The Future of Forestry is NOW!
- harrisonknoll

- Aug 4, 2019
- 7 min read
Updated: Aug 9, 2019


I am going to share with you our recent advancements in forestry through the use of 3D backpack LiDAR systems to capture, document and share accurate geospatially calibrated forest data. Our goal is to provide you with enough knowledge on the technology, how it works and what to ask service providers and hardware providers if you are interested in purchasing and share results from a forester ground truth real-world use case of the system. Using the Green Valley DG50 LiBAckpack LiDAR SLAM + GNSS system we perform a rapid data acquisition of a forest site in northern California. After the in the field collection we take the data back to the office and process to get diameter at breast height measurements of the trees in the scene. In parallel we employed the use of an independent 3rd party forester to perform the same measurement using d-tape (diameter tape measure) and a hand held GPS to locate the trees. If you have any questions, please comment below and let’s start a conversation as a community to build our shared knowledge in this industry.

The Equipment (Background)
The equipment used to capture the 3D dataset is the Green Valley Int’l LiBackpack DG50. This system uses 2 Velodyne VLP-16 LiDAR scanners mounted orthogonal to each other (vertical and horizontal) to capture a complete scene. These LiDAR units give accurate data out to 100m in all directions from the operator. The reason I choose to use this system is because it uses 2 modes of operation to generate the 3D registered point cloud. This is a very important distinction. Let's describe these two modes of operation.

GNSS MODE
In mode 1, the DG50 uses an on-board GNSS (GPS+GLONAS+Beidou+Galileo) receiver and inertial measurement unit (IMU) and a base station GNSS receiver along with the dual LiDAR sensors. This configuration is typical to aerial and mobile LiDAR units and provides the geolocation accuracies one would expect of these systems. To the left is an diagram depicting the setup for aerial application. The backpack is operating under the exact same conditions as the airborne, except the backpack houses all the equipment that the airplane houses in the diagram. This method works by calculating a precise trajectory for the backback using the onboard GNSS + IMU and the base station GPS. A post processing technique using a kalman filter in a post-processing kinematics (PPK) algorithm, results in a cm accurate trajectory in X,Y,Z and a precise orientation of pitch, yaw, and roll. From this we take the accurate laser distance measurements and can project them into 3 Dimensional space. Finally we are left with a georeferenced point cloud.
S.L.A.M. MODE
The second mode of operation is in the S.L.A.M. mode. SLAM is a category of algorithm that stands for Simultaneous Localization and Mapping. SLAM has gained popularity and accuracy from computer science developments in robotics navigation and computer vision. In principal the system is taking a series of 360 snapshots of the environment. Then, in a process similar to photogrammetry, an algorithm calculates key points in each consecutive image and generates tie points between them, in other words matches. These key points can be used to solve for how the backpack must have moved through space to generate this new perspective in the photo. This movement through space is the trajectory, the exact same trajectory we were using the PPK method to solve for in the mode 1 operation. The trajectory is then used to project the LiDAR data into 3D space and generate the 3D LiDAR point cloud. The uniqueness in this mode is that there is no need for a clear view of the sky and operation can continue in GPS void environments. When you combine the two systems, what we have is a system that uses the traditional GNSS+IMU and base station to accurately pin the data to the WGS84 coordinate system, and then uses SLAM to stitch together data when you lose signal. In addition to forestry, you can imagine using this technology to do indoor mapping, tunnel mapping, etc. etc.

The DG50 backpack unit seamlessly switches between the two modes based on available GPS signal. This is the best of both worlds, because, as a user, you can start with a clear view of the sky and lock into GPS, pinning your data to real-world coordinates. Then walk off into the forest where you can lose signal, capture data, and finish in a clearing with a view of the sky and pin the end of your dataset to GPS real-world location. The points in the middle will now all be geolocated, even if you lose GPS signal. Pretty cool! Lets now jump into our test case for DBH measurements of trees.

Into the Forest
To test the DG50 use for forest management we choose to demonstrate and test the ability for the system to quickly and accurately measure DBH. For those who aren’t in the forestry world, DBH stands for diameter at breast height and is an agreed upon standard way of measurement of trees. Breast height is specifically defined as a point around the trunk at 4.5 feet (1.37m in metric using countries) above the forest floor on the uphill side of the tree. DBH is the first most important measurement of trees, followed closely my merchantable height. There are other quantities that are measured, but for the sake of brevity we will stick with DBH for this study.
We traveled up the coast of northern California along with a forester friend to perform this study. Arriving on site we grabbed the backpack and scouted out the area for our backpack LiDAR study. Using our map and KML we located the target section of forest for the study, and time to map. The first step is to setup the GNSS base station over a known survey control point and power on the backpack with a clear view of the sky. With the backpack sitting next to us, we started the system and began collecting GPS data for 5 minutes to calibrate and geolocate our dataset. Once calibrated we went for a leisurely stroll through the forest. While walking we kept in mind the way the LiDAR backpack was observing its data. The way to think about collecting good data, is to imagine the LiDAR is like shining a light out from yourself in all direction and you are painting the landscape around you. So you need to walk behind objects that are occluded by other object in order to get full 360 coverage of the trees. This was easy to do. We simply walked out and did a two loops. In the photo below you can see our exact trajectory. Once completed we again stepped into an area with a clear view of the sky and collected GPS data for a final 5 minutes before shutting the system down. In total, including setup the operation took approximately 30 minutes. The completeness of the survey was verified by a real-time view of the 3D data on a tablet that was WIFI connected to the backpack. Very nifty feature to track where you have already covered and where needs more attention!

Back to the office
Next, we went back to the office to download the data and post-processed the raw backpack data to the final geo-referenced 3D point cloud. This process was about 1-to-1 with the acquisition, 30 minutes. Most of the time was dedicated to joking around in the office.
---Click Image Below to View Live Dataset ---

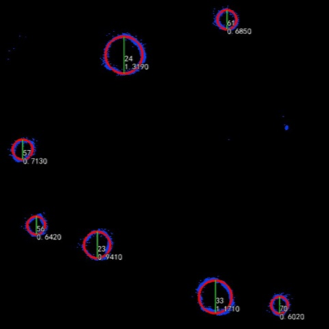
After this the process requires 3 steps to extract the DBH measurements from the trees. First, we classify the bare earth ground and generate a digital elevation model DEM. From the DEM we normalize the data. This means we flatten the whole scene. Once the forest is flattened, it is easy to grab the cross-section at the USA 4.5 ft or international 1.3 m height. This height is the standard “chest height”. It is with the use of an algorithm that LiDAR360 software automatically locates the tree sections and fits a circle to the diameter of the tree. At this stage we do manual intervention through a DBH editor tool to tighten up the measurements. From here we can export a list of the trees that now are assigned a unique tree ID by the software, GPS coordinate, and DBH measurement. And now we are done. We have walked the forest with the backpack, processed the raw point cloud, and calculated the DBH values for each tree.









Forester Verified Results
For the purpose of comparing our results to the traditional DBH measurement technique using a D-tape, we employed a local forester to go out and measure the same area. Below we present our results from the backpack and the foresters results from the traditional surveying techniques.
Results
After examining the calculated DBH and performing the manual fine tuning of the backpack dataset and removing the most extreme outlier found in the full dataset, we had a total of 84 trees. From this we compared with the measured forester data and calculated a mean absolute error (MAE) of 3.03 cm (~ 1.19 inches) and the RMSE to 4.26 cm (~ 1.68 inches) and an R2 value of the fitted vs field collected measurement plot to 0.9886 (See below). We find our data is within a reasonable margin of error from the d-tape measurement technique and we can confirm this is a viable tool that can assist the forester to capture and document forests for DBH measurements. The additional value of having the 3D time stamped geolocated data for inventory and record to the traditional measurements has been an exciting addition to forest inventory projects.

Conclusion
The LiBackpack DG50 offers a readily deployable and rapid analysis system for measuring and recording DBH measurements. The combination of both GNSS/IMU and SLAM technology in one package provides a robust system to gather georeferenced 3D LiDAR data that can be stored and used to track changes over time and create accurate snapshots of current real world status. In future articles we will cover tunnels, and BIM applications with the DG50 backpack system
Follow this link to view 3D LiDAR dataset in your browser ---> http://www.lidar.site/lidar/Forestry.html
CONTACT
If you are interested in the LiBackpack system for purchase or services. Please contact Harrison Knoll at Harrison@LiDARGEAR.com


Comments